 | Tangra 1.4 |
| TANGRA | VIDEO RENDERING | PHOTOMETRY | PRE-PROCESSING | TRACKING | LIGHT CURVES | ASTROMETRY | ADD-INS | LICENSE | DOWNLOAD |
Video Astrometry
(See also Step-by-Step Astrometry Reduction Examples)
Astrometry was an important part of the prototype of Tangra built in the middle of 2009. In fact video astrometry was the driving force for the whole project to commence. During the prototyping phase a number of astrometric positions of asteroids in the range of 12 - 14 mag have been taken with an 8" SCT and WAT-120N+ video camera, have been reduced with Tangra and the positions reported to MPC. The astrometric residuals of these observations reported to MPC are available. While the results are satisfactory (75% of the reported positions of asteroids with well known orbits were with residuals of 0.3" or better and 100% of the reported position were with residuals better than 1") the observations were made with a SCT which has a very small field distortion. You should do your own tests to determine the accuracy of Tangra for your optical system before you do any serious astrometry. And remember that the telescope is only part of the equation and for good astrometry you need a good integrating video camera and at least a few tens of reference stars in your fields.
With video we can do astrometry on two types of objects - fast moving and slow moving. For fast moving objects (having a speed of say more than a few arc sec a minute) video is the natural choice for astrometry because of it's very fine time resolution - 0.04 sec. However video also has advantages for measuring slow moving objects such as comets and asteroids that move less than an arc sec per minute. On the precision side with video we can measure the same object across hundreds of consecutive frames and take the median value, while with classical CCD we usually only have one plate and one measurement. On the affordability side an integrating video camera is 5 to 10 times cheaper than a CCD camera and with an 8" scope you can go as deep as mag 15-16 and even deeper from very dark skies and with bigger apertures.
With an 8" LX90 using an F/3.3 focal reducer, a WAT-120N+ integrating video camera and recording with a digital video recorder in MPEG4 format to a video frame with size 640 x 530 pixels, the pixel size comes to 1.5 - 1.8 arcsec. This is not a bad pixel size and is well within the recommended pixel size for astrometry by MPC. This is exactly the configuration I used to obtain my MPC observatory code and the configuration I currently use to observe and report astrometry of comets.
Tangra can currently do astrometry of slow moving objects and will be extended to also do astrometry of fast moving objects in future (probably when a good observing opportunity arrives). After you load a video file you'll need to use the Video Actions -> Astrometry from the menu to start an astrometric measurement. You will need to have a local copy of a large star catalog. It is recommended to use UCAC3 but you can also use UCAC2 or NOMAD. The related topics that will be covered below are:
Configuration Settings
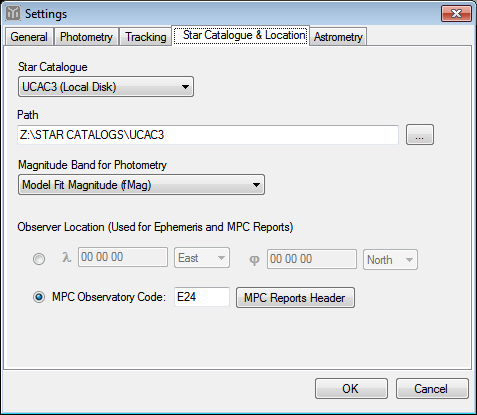
There are a number of settings used by Tangra when doing astrometry and they can be configured from the two tabs "Star Catalogue & Location" and "Astrometry".
The catalog is used for both astrometry and calibrated photometry. The term "calibrated photometry" refers to determining the stellar magnitude of an object from the known catalog magnitudes of the solved reference stars. The term is used so this type of photometry can be distinguished from the light curve photometry where no magnitudes are calculated and instrumental intensities are given instead. The Magnitude Band for Photometry determines which magnitude from the catalog will be used for the photometric fit. If you have recorded the video using a V or R filters then you will prefer to use V or R magnitude band from the catalog. If the record is unfiltered when using unfiltered magnitude may be most appropriate. The coordinates of the site (or the MPC observatory code) is used for the ephemeris when identifying objects in the FOV and the observatory code is also used for the MPC reporting.
There are two types of astrometric fits that are used by Tangra - linear and quadratic and there are three configuration settings that can be used to tell Tangra what to do in regards to this. An "Automatic" fit, which is also the default value, means that Tangra will decide whether to use linear or quadratic fit based on the number of identified reference stars. "Linear Fit" and "Quadratic Fit" will force the usage of the selected fit regardless of the number of reference stars in the FOV.
 |
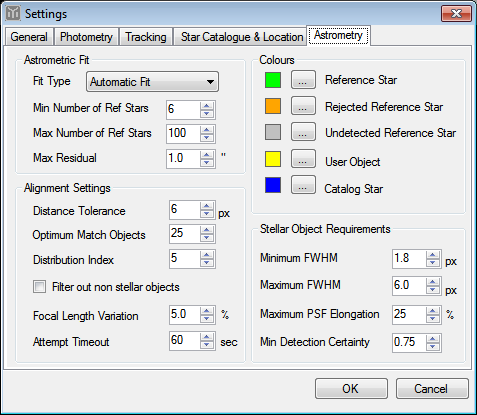 |
Tangra will only proceed with the astrometric measurements if the selected "Min Number of Ref Stars" are available as reference stars and this will exclude all stars that have been rejected for high residuals. The "Max Number of Ref Stars" allows you to control the maximum number of stars that will be used for a plate solve and measurements. With assumed catalog position error of 0.5" and 100 reference stars the expected measurement precision should be 0.05". This is a very good value and generally there is no need to use more than 100 reference stars. If there are too many stars in the field Tangra may be slow as it may take a few seconds to align and solve each of the frames. The "Max Residual" controls whether a reference star will be included or excluded if it has higher residual than the configured Max Residual.
The Stellar Object Requirements section can be used to apply additional constraints to the objects on the frame and exclude non stellar objects such as hot pixels. While the best way to correct the hot pixels is to take and apply a dark frame this is generally not possible to be done post factum. Tangra can do exclusion of hot pixels and other non stellar objects based on the FWHM and the elongation of the fitted Gaussian. The "Min Detection Certainty" can be used to exclude too fain objects. The non stellar objects will not be excluded from the image alignment process unless the "Filter out non stellar objects" under the Alignment Settings is checked.
The rest of the alignment settings are used during the image alignment and are explained in the How Image Alignment Works section below.
Calibration
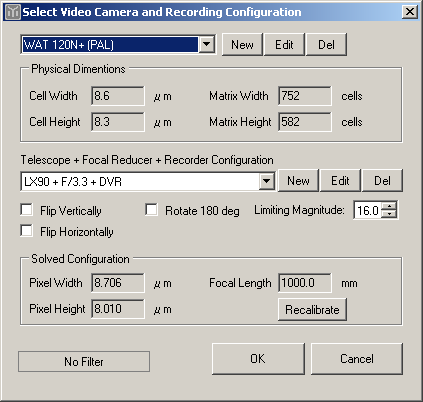
Before Tangra can align a frame and perform astrometry it needs to know the effective pixel width and height as well as an initial value for the effective focal length. If you are using a number of different optical-recording configurations you will need to align each of them before you can process videos recorded with them. Every change in the optical path such as focal reducers, diagonals, filters, etc must be considered as a new configuration. Also every change in the video recording process including hardware grabber, hardware recorder, software drivers, grabbing software and settings of the grabbing software is likely to result in a new configuration which will require recalibration.
Detailed instructions on how to complete a calibration are available here along with two very small sample videos you can use to practice the calibration process yourself. If you have problems with the calibration then you may want to have a look at the Common Plate Solve Issues.
Astrometric Measurements
This section explains how to perform a multi frame astrometry of slow moving objects in Tangra. It is required that a calibration has been already successfully accomplished.
Indeed the first step after opening the video and choosing Video Actions -> Astrometry is to select the correct configuration to be used. If the wrong configuration is selected or if the calibration has been done with slightly different equipment then the field may not be solved. You should only need to select the configuration without changing the flip/rotate settings. You can also select the limiting magnitude on the video if you want Tangra to consider less stars when doing an alignment. However in the vast majority of the cases the default "determine limiting magnitude automatically" should work well.
 |
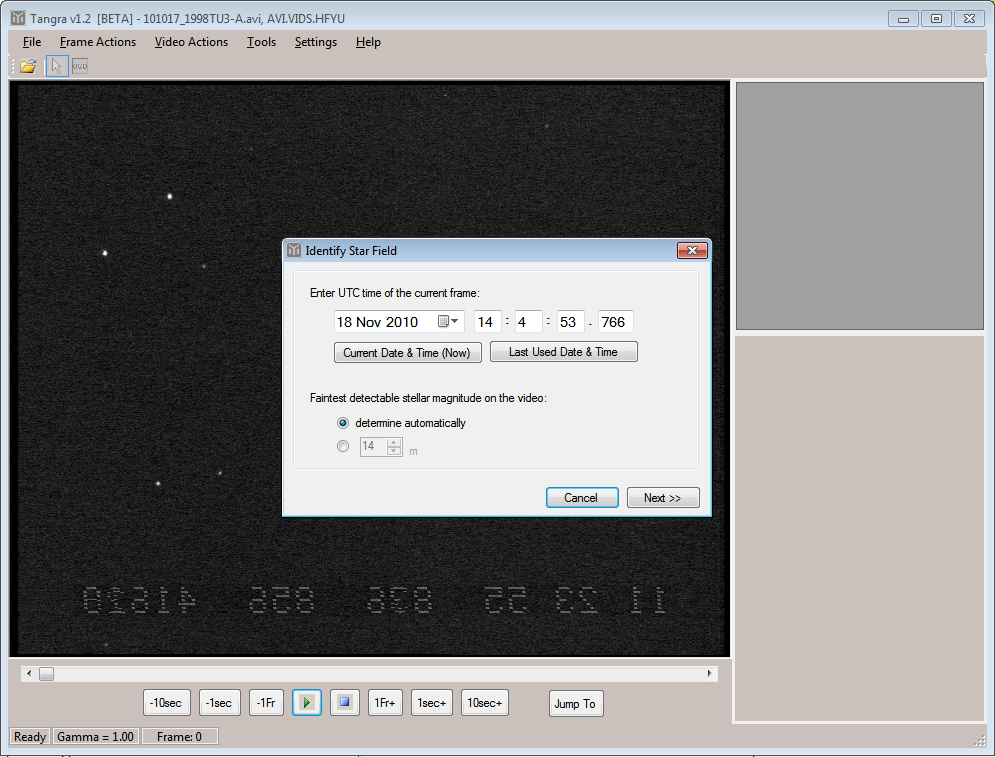 |
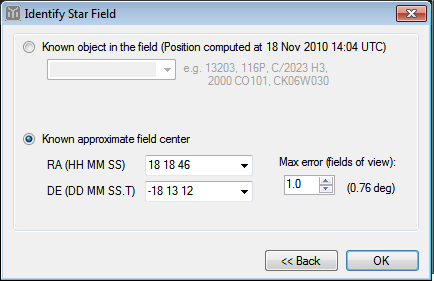
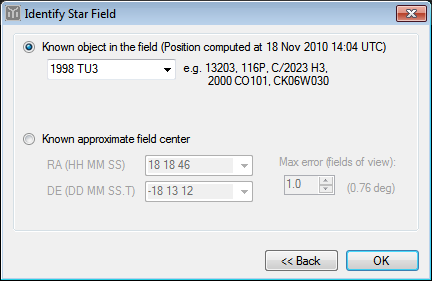
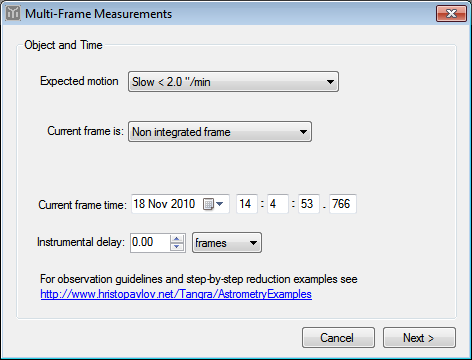
After the correct configuration is selected Tangra will ask you to enter the time of the currently visible video frame (top right screenshot) and will use this as a reference. Next you will need to identify the approximate center of the field by either entering the coordinates of the center or by entering the designation of a known object. If a designation of an object is entered then Tangra will query only the MPC to get the current position of the object and will use this as approximate coordinates of the center.
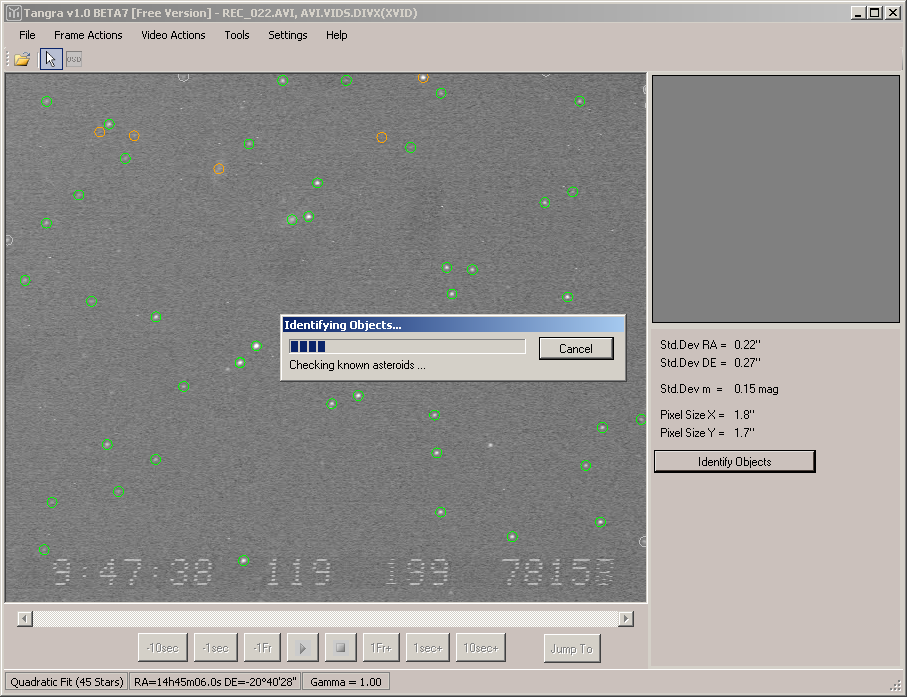
Tangra now knows everything it needs to do an image alignment. If you have specified a designation of a known object after the alignment and after the field is solved, Tangra will also display the position of the object. Otherwise it will only display the solved field without circling your object. You can now use the "Identify Objects" button to identify any known asteroids/comets in the fields. For this Tangra will do another online query and get all known objects in the field of view from MPC. Both online queries for determining the position of a selected object and for determining the known objects in the field of view may not be very fast and require active internet connection.
 |
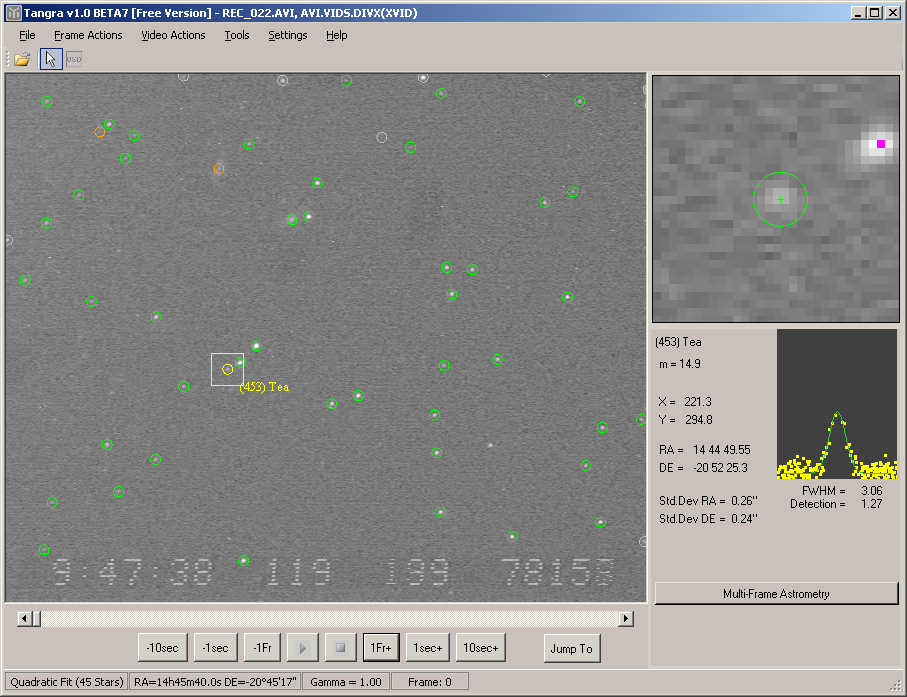 |
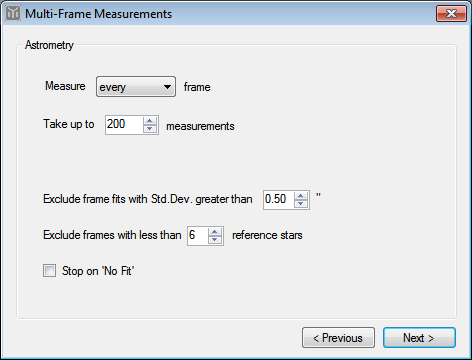
After the field is solved Tangra can measure any object in multiple frames and then select the median positions from the multiple measurements. To start a new multi frame measurement press the "Multi-Frame Astrometry" button after you have selected your target. There are a number of parameters that can be configured. During the measurement process Tangra will measure up to the configured number of frames and will then stop, unless you stop the measurement before that. You can measure every frame or only one frame in every 2, 4, 8, 16, etc frames. This option has been added for integrating video cameras if you want to measure only one, two etc frames from each integrated interval. For integrating video cameras there is also a way to specify the integration used and the instrumental delay. For this measurement we will pretend that there has been no integratoin used. For most slow moving objects this assumption is fine i.e. doesn't lead to timing and position errors. However for fast moving objects the measurer must configure correctly the integration and instrumental delay. See these Astrometry Examples for more in depth information.
It is important to confirm the time of the current frame. This time will be used to calculate the mid time of the measurement for the MCP report. You can also configure Tangra to not take measurements if the standard error of any of the fits is greater than the configured value or if less than the selected number of reference stars are available in the solution.
By default Tangra doesn't measure magnitudes when doing astrometry but you can enable this from the second tab "Photometry" (bottom right image). When "Fit and Compute Stellar Magnitudes" is checked Tangra will do calibrated photometry and will also measure the magnitude of the target in every measured frame. This will work regardless of the Gamma settings used to record the video. Further the magnitude band to be used from the catalogue and the output magnitude band can be changed as well as the algorithms to be used for the measurement. The output magnitude band is also used for the magnitude band flag in the MPC report.
 |
 |
 |
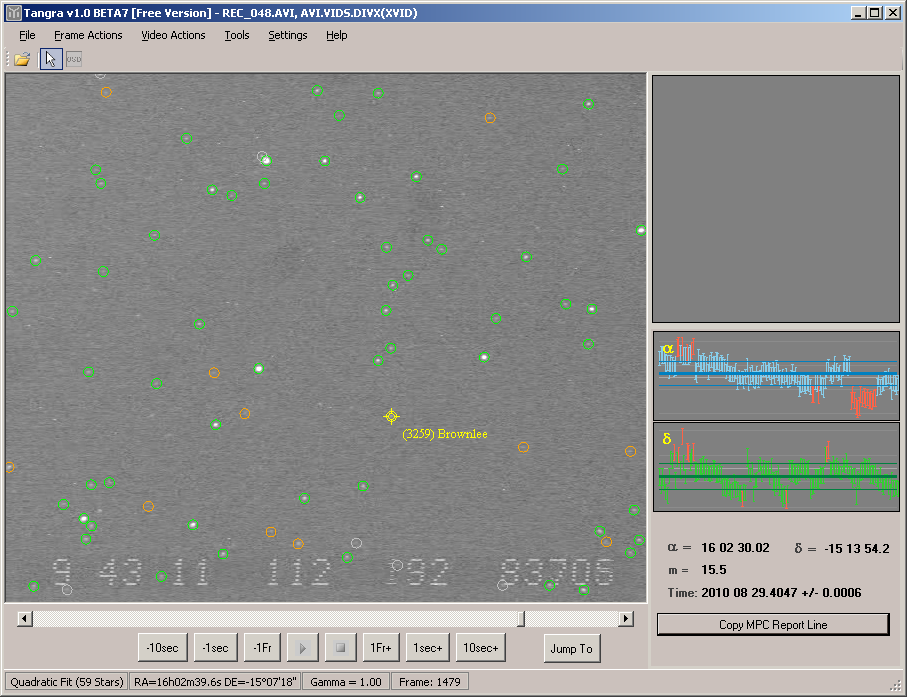
When ready press "Start" and Tangra will begin doing measurements. Every measured frame will be displayed on the right as series of RA and DEC values with their error derived from the fit (the array of blue and green vertical bars on the image below). When the measurement is finished you can click on the RA and DEC series and select measurements to be used to determining the median RA/DEC values. This way very wrong measurements will be excluded. Once you have selected both RA and DEC interval to be used, Tangra will display below the computed median RA/DEC as well as the time of the middle of the measurement interval and the magnitude (if magnitude fit has been selected). Now you can press the "Copy MPC Report Line" button for Tangra to generate an MPC report line for you from this measurement. You should then put this line in a report file following the required standard should you want to submit your observation to MPC.
A more detailed information including walk through example of a fast moving object astrometry is available in the AstrometryExamples
How Image Alignment Works
Image alignment is the process of automatic recognition of the stars in a video frame and matching/correlating an object from the video frame to each of the celestial stars in the region. Tangra can do successful image alignment even when the field of view (FOV) is rotated and not oriented North-Up which makes it possible to do astrometry with Alt-Azimuth mounts with less effort. The algorithm that is used by Tangra for image alignment is known as 'Pyramid' and is used to solve a 'lost in space' problem in artificial satellites orbiting the Earth. The difference is that satellites have a precomputed full index of all bright stars and use a wider FOV to determine where the satellite is heading to, while Tangra builds the index on the fly for a smaller region of the sky and finds the position and orientation of the FOV but needs to know the approximate position of the center of the field with a precision of one FOV diagonal (typically 20-60 arc min). To better understand the meaning of the image alignment settings in Tangra we will get a bit deeper into how the Pyramid alignment actually works and will explain the various settings as we go.
It is all about matching distances between known objects on the sky and distances between unrecognized objects in the video frame. In order to do this Tangra needs to know how to compute distances in arcseconds from distances in pixels in the video. And this is why a calibration is required. Without having calibrated the recording configuration Tangra would not correctly compute the distances between the objects on the video frame and automated alignment would be impossible. During the alignment the user enters the approximate coordinates of the center of the field, the error in FOVs and the limiting magnitude. Then Tangra gets the stars in the region and builds an index with all distances between all star pairs. It then picks a number of bright objects from the video and checks all possible triangles between the objects on the video trying to match them to a triangle on the sky. In this process Tangra allows for a small focal length variation. If a candidate triangle is found then Tangra builds pyramids using the three stars of the triangle combining it with each other object from the video frame and tries to match the pyramid to four star on the sky plane. If this is successful then Tangra computes preliminary field orientation, field center and effective focal length. Now having a candidate match of 4 stars Tangra computes the expected positions of all other stars that fall in the video frame. Then all correlated stars are now used for a tangential projection fit and if more than the "Minimum Number of Stars" have been successfully located then the plate is considered as solved.
There are a number of factors that affect how fast the image will be aligned. The obvious ones are the number of objects from the video used for the pyramid matching and the number of stars on the sky used for the matching. The problem with identifying stars on the video frame without knowing where the video is pointing to is that we don't know when to stop resolving star candidates. How many candidate objects could be there in the video depends on the exposure time, noise and telescope aperture. The "Optimum Match Stars" is used to control when Tangra will stop looking for more candidate star-like objects in the video. There is also an optimization about the order in which the triangles will be checked that favors triangles containing the brightest candidate stars to be checked first. However in the presence of bright hot pixels the correct triangles will not be actually checked first. You normally should not need to change the "Optimum Match Stars" unless your video camera always has a large number of hot pixels. In such a case taking and subtracting a dark frame is the recommended approach for addressing the problem. But if this is not possible then using a higher number of "Optimum Match Stars" will help you get your plates solved but for the sacrifice of more time required to complete the operation.
The distance tolerance is used during the triangle matching when deciding whether a distance measured on the video frame matches a distance on the sky. If the difference between the two distances is smaller than the configured "Distance Tolerance" then the two distances are considered the same, the objects are assumed to match and further tests are done with the candidate objects. If the "Distance Tolerance" is too small then you may never get a solution. If the "Distance Tolerance" is too big and too many objects will be considered as potential matches (including many false positives) and the result will be a slow image alignment process.
If the alignment is taking too long then there is probably something wrong. You also don't want to wait forever so configuring a sensible "Attempt Timeout" will help you deal with really bad fields or wrong configurations/coordinates. Tangra will abort the image alignment attempt if the time taken for the alignment exceeds the configured "Attempt Timeout".
Finally the "Focal Length Variation" is used to configure what sort of focal length variation (compared to the saved focal length in the configuration) will be considered for the possible solution. Generally this value shouldn't have a significant effect on the speed of the image alignment but bigger values tend to slow down the process a bit. For best results when you do the calibration use a video recorded in moderate outside temperatures (not too cold and not too hot) which should correspond to the average focal length of your system. Tangra should not need different calibration of the same system for winter and summer if the Focal Length Variation is large enough.